
生物智慧中汲取灵感,突破传统飞行范式
在自然界中,猎鹰以180度倒转锁定猎物,蝙蝠在洞穴中倒挂栖息,乌鸦在城市上空炫技求偶——这些看似高风险的特技飞行,实则是生物在进化中锤炼出的生存智慧。
而如今,这种智慧正在被赋予无人机。传统思路总在硬件性能上做加法(更强的电机、精度更高的传感器),但我们选择在规划算法上做乘法。通过构建动作-意图转换标准(将期望飞行的动作转化为可量化的意图),以及风险-收益评估标准(计算躲避障碍,节省能量和完成特技动作三者之间的最优解),我们证明了四旋翼无人机仅靠智能算法就能解锁更复杂的飞行动作,实现了包括多个连续经典特技动作任意组合以及超过200米的全程无人干预自主飞行,为资源受限场景提供了全新的技术思路。

多项硬核成果,实力诠释技术优势
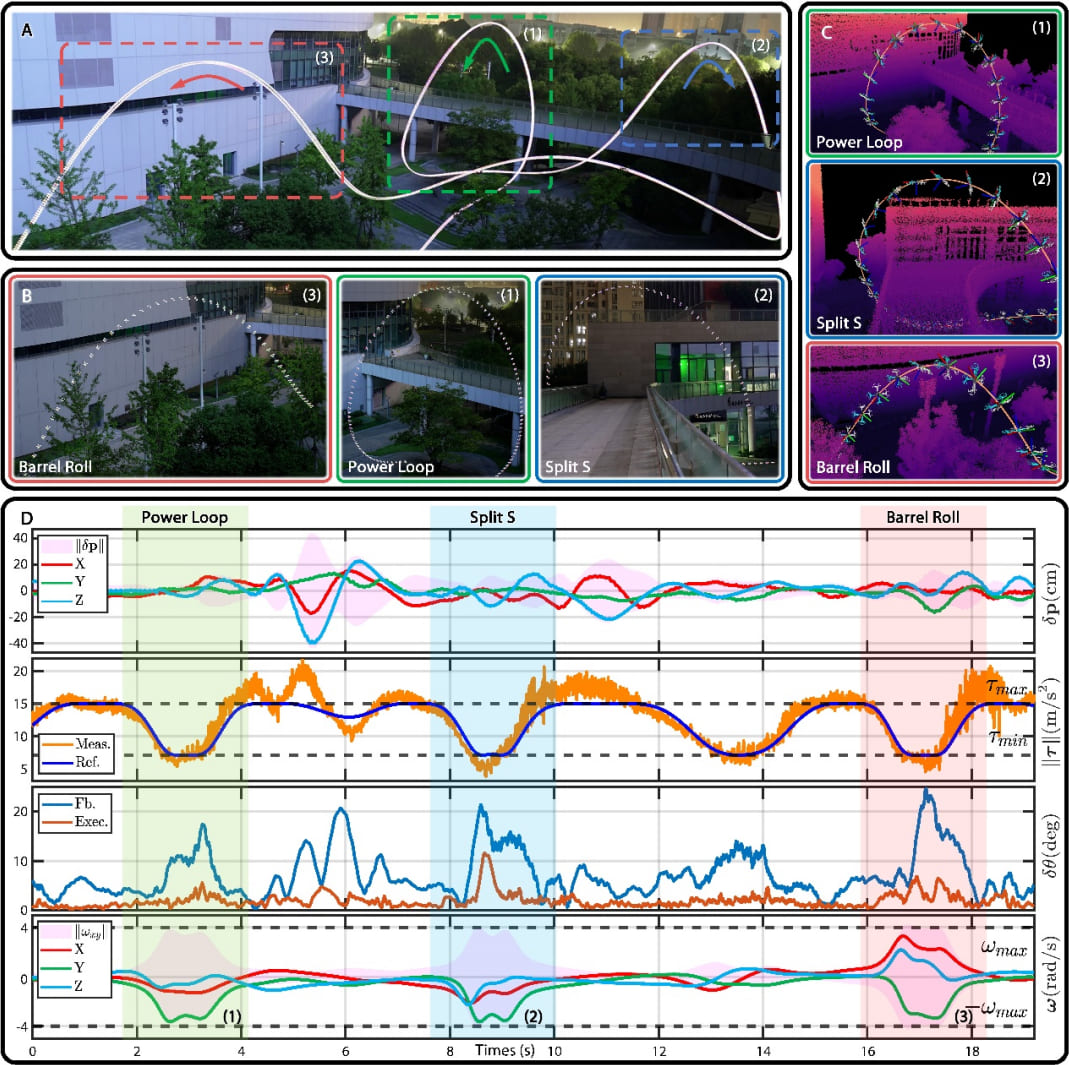
1)非结构化超大场景的特技飞行:
空中机器人在不依赖外部定位的情况下,在花飞的经典场景,即非结构化的超大室外环境中,自主完成了三个连续的经典特技动作,220米的飞行全程无人干预。在飞行过程中,我们特意将四旋翼的动力限制在通用无人机的常规水平范围(1.5G的推力和4弧度每秒的角速度),系统仍能实现专业竞速机的特技表现,这证明了智能算法能够突破物理硬件性能的天花板。
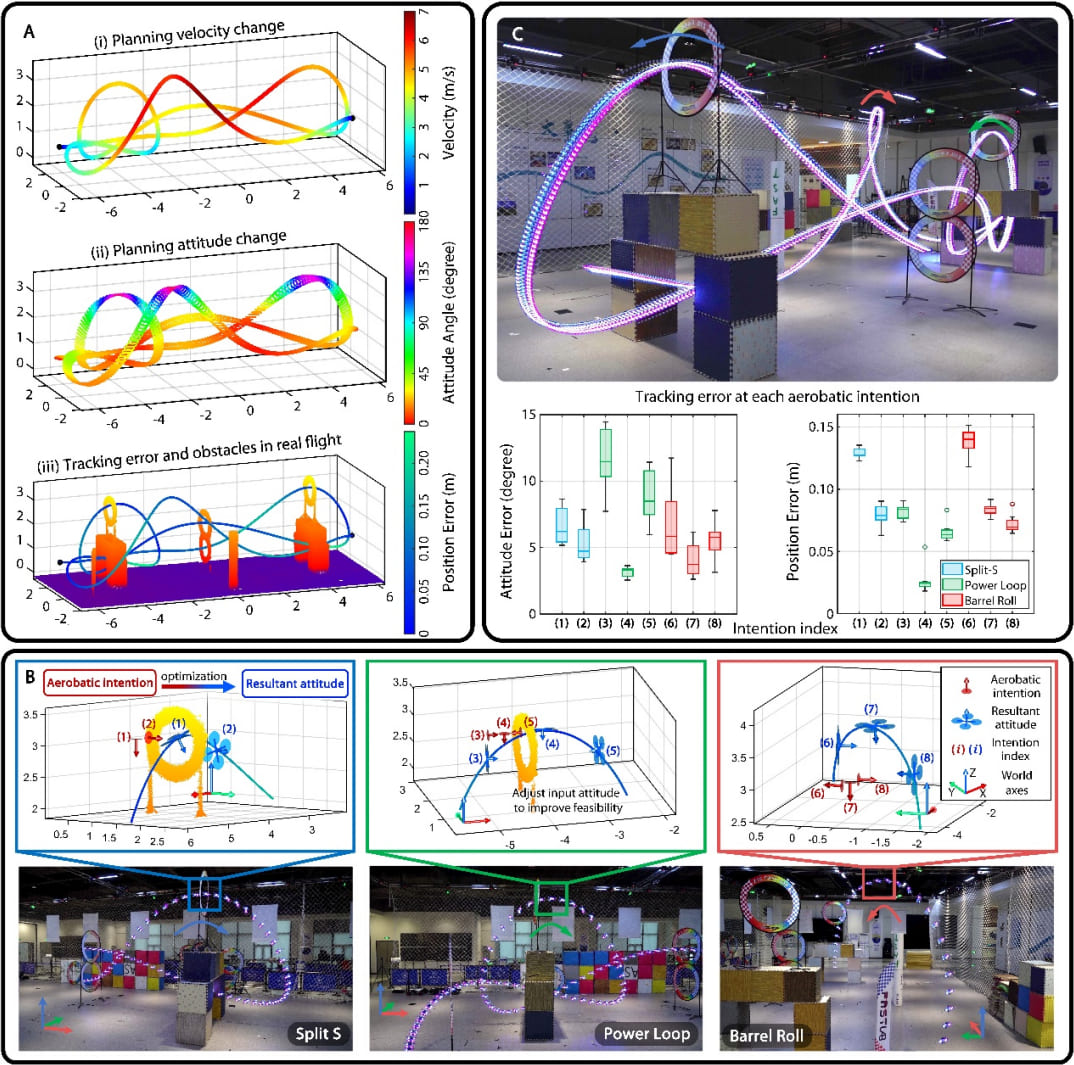
2)密集障碍环境下的高难度挑战:
在仅3.5米高的狭窄障碍空间里,空中机器人展现了媲美蜂鸟的灵巧性:倒飞穿过直径80厘米的圆环、在隧洞中连续蛇形机动。所提系统独创的"意图修正"功能如同经验丰富的导航员,即使输入特技意图不合理(如多个特技动作的间距过窄),系统仍然会自动调整到安全合理的位置。在多次重复测试中,空中机器人以最高7米/秒的高速穿越障碍时仍保持15厘米内的跟踪精度,这体现了系统生成动作的安全性和稳定性。
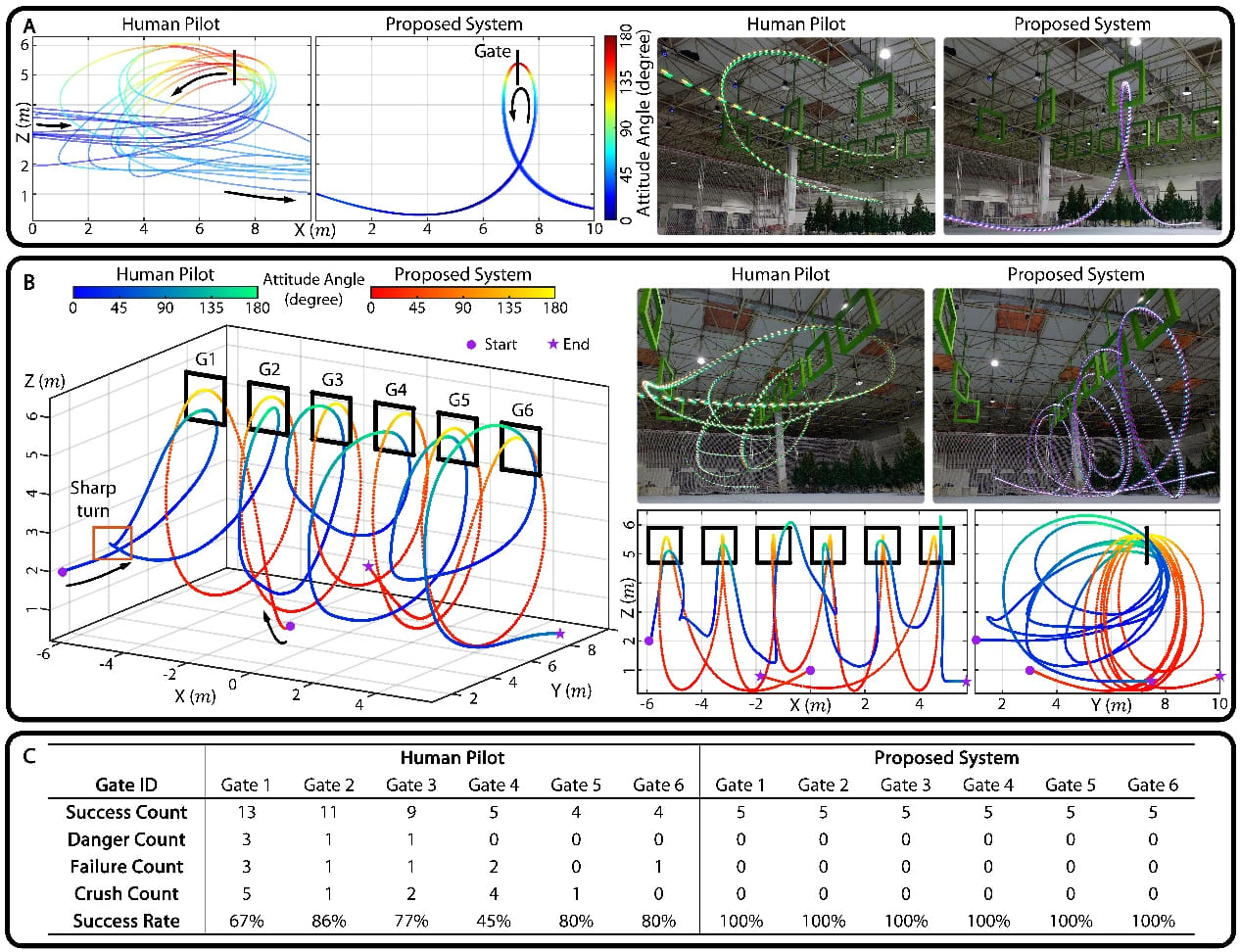
3)人机特技对抗:
在与中国无人机顶尖飞手展开的同台竞技中,自主系统展现出超乎人类的操作稳定性:在连续穿越6道1.2米窄门的测试中,人类飞手成功率仅12.5%(3/24次),而系统实现100%完美通关。在定性的对比实验中,自主系统更是展现了顶尖飞手难以达到的效果:在重复飞行的单特技动作测试中,专业飞手在完成特技动作时,需要更多的安全空间才能恢复稳态,而系统可以将空翻动作控制在小几倍的区域范围内。即便选择飞手的最佳飞行效果做对比,其轨迹也仍然不如空中机器人飞得流畅。这证明系统在生成和执行复杂特技动作的能力,已达到人类难以企及的水平。
——以上研究内容源自https://www.science.org/doi/10.1126/scirobotics.adp9905
(本工作第一作者为微分智飞算法实习生王鸣杨,通讯作者为公司首席科学家高飞
畅想未来
可以预见,空中机器人的未来充满无限可能。比如在火山监测领域,通过动态姿态调整与轨迹优化,空中机器人有望实现喷发口边缘的探针抛投部署;在灾害救援中,结合特技飞行的高速穿梭能力,可能实现对坍塌建筑内狭窄缝隙的快速探测。此外,针对深空探测场景,研究提出的动态轨迹规划方法或为航天器在太空垃圾密集区的安全机动提供理论参考,通过多自由度姿态控制降低极端机动对载人设备的过载冲击。
尽管目前还存在局限,但我们已经锁定了突破方向。随着 “感知 - 决策 - 执行” 闭环系统的构建,类生物特技飞行的全自主化作业将不再是遥不可及的梦想。请持续关注微分智飞的科研进展,一同来见证空中机器人在科技创新的驱动下,不断突破自我,开启更多应用新场景,为人类社会的发展创造更多价值。